
O que é o controle de jato de spray?
Quando sistemas de spray são usados, o tamanho do cone de spray e a quantidade de spray devem condizer com a respectiva aplicação. A geometria do cone de spray e a quantidade de spray também dependem do meio que é usado (primer, adesivo, solvente, água, álcool, tinta, etc.), do bico do spray, na sobrepressão e na dosagem da quantidade de spray. Especialmente se um adesivo receber o spray, parte do bico do spray pode ficar obstruído, o que resulta emu ma mudança tanto de quantidade de spray quanto na geometria do mesmo. O jato do spray pode também mudar sua direção e o ângulo de abertura.
 Como se parece um jato de spray?
Como se parece um jato de spray?
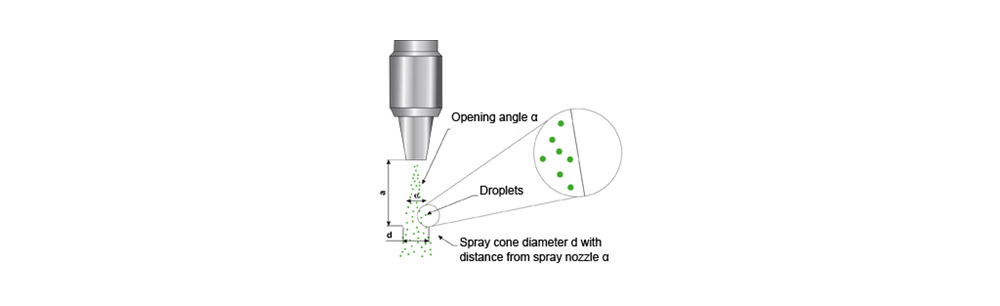
Um jato de spray é, via de regra, uma “formação disparada” de pequenas partículas (de tamanho entre alguns micrômetros e algumas centenas de micrômetros, dependendo do meio do spray) que são geradas no bico do spray devido a atomização do agente pulverizador. Estas partículas saem do bico do spray a uma certa velocidade e são então desaceleradas devido a fricção do ar.
O jato de spray é definido pelo ângulo de abertura do cone de spray e pela quantidade de spray (partículas / unidade tempo ou agente pulverizador).
 Como é controlado o jato de spray?
Como é controlado o jato de spray?
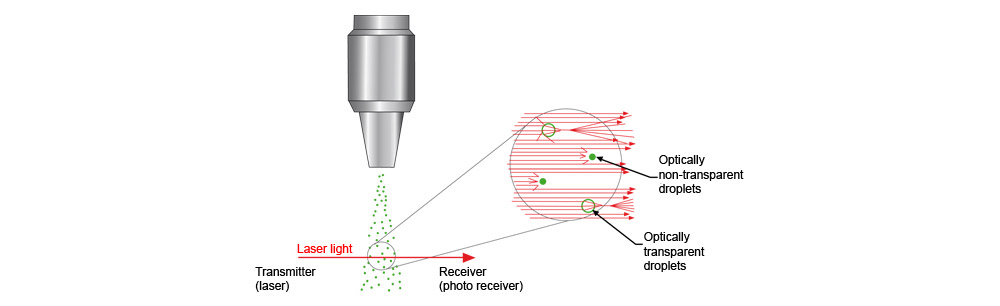
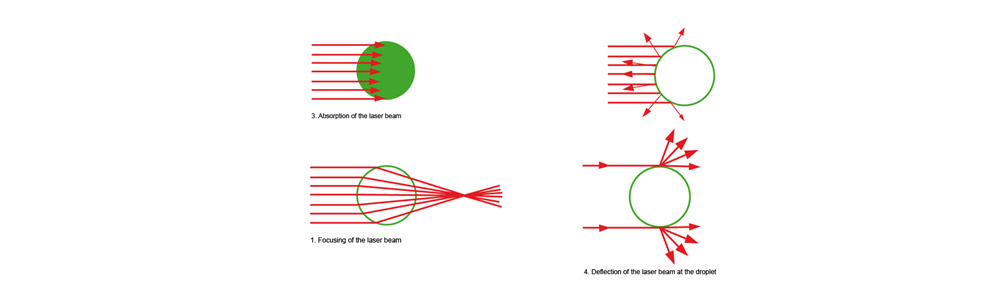
Informação sobre a quantidade de spray, por exemplo, pode ser obtida usando um raio laser que, pelo menos parcialmente, passa através do cone de spray. No seu caminho através do cone de spray, o raio laser é desviado pelas partículas individuais. Esse desvio é causado pela reflexão nas partículas ou por foco do raio laser, por que as partículas, seforem opticamente transparente, funcionam como microlentes. Uma parte da luz é absorvida pelas partículas. No final, menos luz chega ao lado oposto do jato de spray.
Um sistema de controle de jato de spray informa o usuário sobre tais mudanças do jato de spray.
Controle do jato de pulverização, Um jato de spray pulsado e fracamente dosado deve ser controlado.
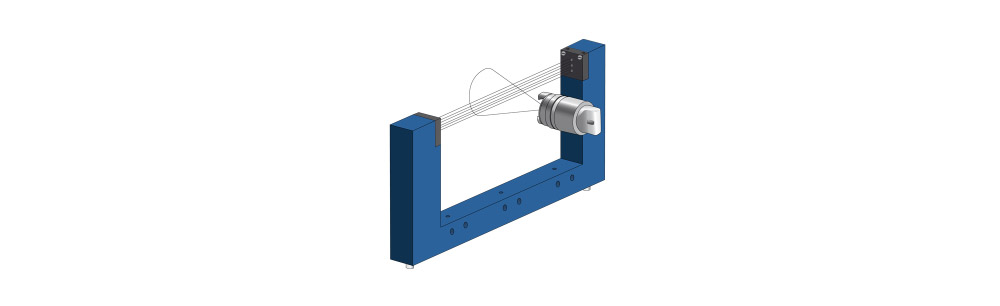
 Para essa finalidade, um sistema de três feixes de laser colimado através de feixes tipo SI-JET-CONLAS3-T-d1.5 (transmissor) e SI-JET-CONLAS3-R (receptor) é usado. Nesse caso, a distância entre o receptor e a unidade transmissora é de aproximadamente 350 mm e o jato de jato de spray atinge os feixes de laser aproximadamente no meio entre o transmissor e a unidade receptora. O jato de spray pode ser adequadamente controlado adequadamente, conforme mostrado nas capturas de tela.
Para essa finalidade, um sistema de três feixes de laser colimado através de feixes tipo SI-JET-CONLAS3-T-d1.5 (transmissor) e SI-JET-CONLAS3-R (receptor) é usado. Nesse caso, a distância entre o receptor e a unidade transmissora é de aproximadamente 350 mm e o jato de jato de spray atinge os feixes de laser aproximadamente no meio entre o transmissor e a unidade receptora. O jato de spray pode ser adequadamente controlado adequadamente, conforme mostrado nas capturas de tela.
Controle de jato de spray em áreas potencialmente explosivas
São usadas fibras ópticas para permitir o controle do jato de spray também em ambientes onde por longos períodos de tempo tem uma atmosfera explosiva perigosa em forma de uma mistura de ar e gases combustíveis, vapores ou misturas.
O controle do jato de spray é possível também em zonas explosivas Ø da diretriz ATEX. Os componentes eletrônicos e optoeletrônicos do Sistema de controle do jato de spray estão localizados fora da zona Ø.
Apenas os componentes ópticos ou opto-mecânicos (Front-end opto-mecânico) estão localizados na área . A conexão entre o Front-end e a unidade de avaliação é estabilizada por meio de fibras ópticas.
Deve-se tomar cuidado para garantir que a densidade da potência óptica não exceda um certo limite. A densidade de potência óptica dos produtos da SI está bem abaixo dos limites permissíveis.
 O sistema de controle de jato de pulverização SI-JET-CONLAS3 usa três feixes de laser para monitorar a densidade a densidade e a simetria em torno do ângulo de abertura do jato de pulverização do jato de pulverização. Com o abrangente software SI-JET-Scope
O sistema de controle de jato de pulverização SI-JET-CONLAS3 usa três feixes de laser para monitorar a densidade a densidade e a simetria em torno do ângulo de abertura do jato de pulverização do jato de pulverização. Com o abrangente software SI-JET-Scope
o sistema pode ser parametrizado no Windows®.
Vantagens para o cliente
– Design telecêntrico permite uma grande distância entre o transmissor e o receptor
(faixa de medição de 50 mm a 2000 mm)
– Cálculo da média (mais de 32.000 valores)
– Interface RS232 (conversor USB ou Ethernet disponível)
– Interface Windows® unser, função de escopo
– Várias possibilidades de ensino (via PC ou PLC)
– 5 saídas digitais para saída dos vetores detectados
– Alta resolução (conversor A/D de 12 bits)
– O ajuste de brilho pode ser ativado (STATIC, DYNAMIC)
– Vários algoritmos de avaliação podem ser ativados
– Compensação de temperatura
– Até 32 vetores podem ser ensinados (máx. 64 no modo de grupo)
– Frequência de varredura máx. 45 kHz (em operação CC), frequência de comutação típica de 60 kHz
– Alta faixa dinâmica devido ao ajuste ajustável da potência do transmissor e à amplificação do receptor
– Insensível à luz externa em operação CA
Conclusão
O sensor de jato de spray SI-JET permite uma aquisição de sinal altamente flexível. O sensor, por exemplo, pode ser operado no modo de luz alternada (modo CA), o que significa que o sensor não é influenciado pela luz externa, ou no modo de luz constante (modo CC), o que proporciona operação excepcional do sensor em alta velocidade. Com ajuste contínuo da fonte de luz integrada, ganho selecionável do sinal do receptor e uma função INTEGRAL, o sensor pode ser ajustado a praticamente qualquer superfície.
O sensor de jato de spray SI-JET detecta a radiação que é transmitida pelo objeto de medição. Dependendo do sistema, um LED de luz vermelha ou um diodo de laser com potência de transmissão ajustável é usado como fonte de luz para o sensor SI-JET. Um receptor integrado de três camadas é usado para o componente esquerdo, central e direito da luz transmitida pelo objeto de medição.
Os dados brutos são detectados e exibidos com resolução de 12 bits.
Uma densidade e dois valores de simetria são formados a partir dos valores detectados para os canais esquerdo, central e direito.
Esses valores e suas tolerâncias ajustáveis individualmente representam um status, e esse status é chamado de vetor.
Os sensores da série SI-JET podem ser “ensinados” até 31 vetores que podem ser fornecidos diretamente nas saídas e até 64 vetores que podem ser emitidos por meio de agrupamento.
Como um recurso especial, o sensor pode receber dois conjuntos de parâmetros completamente independentes. A entrada IN0 pode então ser usada para informar ao sensor com qual conjunto de parâmetros ele deve trabalhar. A detecção de vetores opera continuamente ou é iniciada por meio de um sinal de acionamento externo do PLC externo. O respectivo vetor detectado é fornecido como um código binário nas 5 saídas digitais ou pode ser enviado diretamente para as saídas, se apenas até 5 vetores tiverem de ser detectados.
Por meio da entrada IN0, o sensor pode ser programado para até 31 vetores (máx. 64 vetores no modo de grupo). Para isso, o modo de avaliação. Para isso, o modo de avaliação correspondente deve ser definido com o software.
Em outro modo de avaliação, um limite de comutação pode ser definido para cada um dos 3 canais esquerdo, central e direito. A respectiva saída comuta quando o valor cai abaixo desse limite.
Os parâmetros e valores de medição podem ser trocados entre o PC e o sensor por meio da interface RS232. Por meio dessa interface
Por meio dessa interface RS232, todos os parâmetros para detecção de vetores podem ser armazenados na EEPROM não volátil do sensor.
Quando a parametrização é concluída, o sensor continua a operar com os parâmetros atuais no modo STAND-ALONE sem um PC.
As atualizações de firmware necessárias podem ser facilmente realizadas por meio de RS232, também com o sensor instalado.
Os sensores da série SI-JET podem ser calibrados (calibração de canal). Essa calibração é realizada no modo de luz transmitida,
quando não há nenhum objeto entre o transmissor e o receptor.